Circuito de accionamiento 1
Circuito de accionamiento 1
Parámetros
| Parámetros | Especificación |
| Fuente de alimentación | DC12V (24V puede ser personalizable) |
| Interfaz | RS422 |
|
Conductores |
Ancho máximo de pulso: 3 ms (se puede configurar mediante el comando del puerto serie) |
| Control de conducción | Puede controlar la frecuencia de transmisión y cambiar por RS422. |
| Corriente de conducción | 100 μJ láser: 6A /200 μJ láser: 12A/300 μJ láser: 13A-15A Láser 400/500μJ: 14A-16A |
| Tensión de conducción | 2V |
| Frecuencia de descarga | ≤10Hz |
| Modo de fuente de alimentación | CC 5V |
| modo de disparo | Disparador externo |
| Interfaz externa | TTL (3,3 V/5 V) |
| Ancho de pulso (descarga eléctrica) | Depende de la señal externa, <3ms |
| Estabilidad actual | ≤1% |
| Temperatura de almacenamiento | -55~75°C |
| Temperatura de funcionamiento | -40~+70°C |
| Dimensión | 26 mm * 21 mm * 7,5 mm |
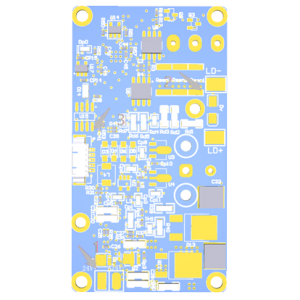
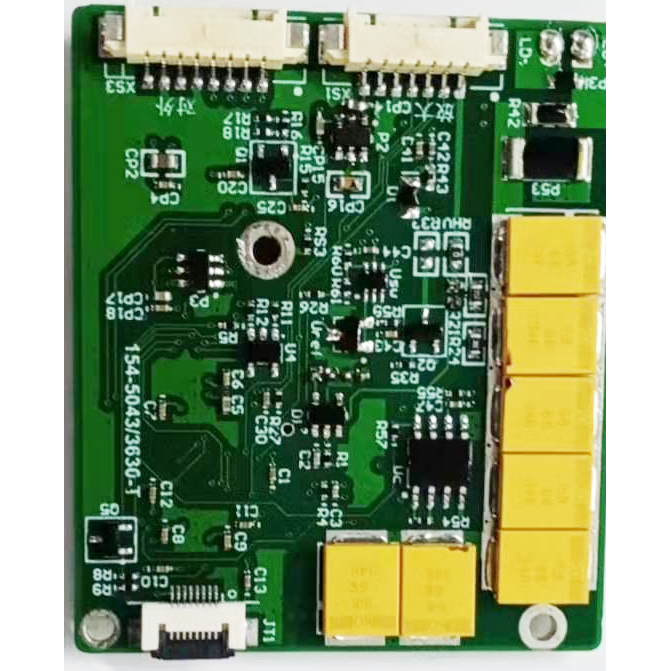
Interfaz
LD+ y LD- se conectan al polo positivo y al polo negativo respectivamente.Se muestra de la siguiente manera:

Interfaz externa

Como se muestra arriba, XS3 es una interfaz externa, puede conectarse a una fuente de alimentación externa y computadoras superiores.Información de conexión como se muestra a continuación:

| 1 | RS422RX+ | Interfaz |
| 2 | RS422 RX- | Interfaz |
| 3 | RS422 TX- | Interfaz |
| 4 | RS422 TX+ | Interfaz |
| 5 | RS422_GND | TIERRA |
| 6 | VCC 12V | fuente de alimentación de 12V |
| 7 | TIERRA | Fuente de alimentación GND |
Forma: RS422, tasa de baudios: 115200bps
Bits: 8 bits (un bit de inicio, un bit de parada, sin paridad).Los datos consisten en bytes de encabezado, comandos, longitud de bytes, parámetros y bytes de verificación de paridad.
Modo de comunicación: modo maestro-esclavo.Una computadora superior envía órdenes al circuito de manejo, el circuito de manejo recibe y ejecuta órdenes.En modo de trabajo, el circuito de accionamiento enviará datos a una computadora superior periódicamente.Detalles de pedidos y formularios como se muestra a continuación.
1) Una computadora superior envía
Tabla 1 Formulario de envío
| STX0 | CMD | LARGO | DATOS1H | DATOS1L | CHK |
Tabla 2 Especificación del formulario de envío
| NO. | Nombre | Especificación | Código |
| 1 | STX0 | Marca de inicio | 55 (H) |
| 2 | CMD | Dominio | Se muestra como tabla 3 |
| 3 | LARGO | Longitud de bytes (excepto STX0, CMD y bits de verificación) | / |
| 4 | DATOS | Parámetros | Se muestra como tabla 3 |
| 5 | DATOS | ||
| 6 | CHK | Pago XOR (Excepto los bytes de verificación, todos los bytes pueden tener una verificación XOR) | / |
Tabla 3 Especificación de comandos y bits
| NO. | Comandos | Especificación | bytes | Nota. | Longitud | Ejemplo |
| 1 | 0×00 | Stand by (paradas continuas de trabajo) | DATOS=00(H) DATOS=00(H) | El circuito de accionamiento se detiene | 6 bytes | 55 00 02 00 00 57 |
| 2 | 0×01 | Trabajo individual | DATOS=00(H) DATOS=00(H) |
| 6 bytes | 55 01 02 00 00 56 |
| 3 | 0×02 | Trabajo continuo | DATOS=XX(H) DATOS=AA(H) | DATA= ciclo de trabajo, unidad: ms | 6 bytes | 55 02 02 03 E8 SER (1 Hz en funcionamiento) |
| 4 | 0×03 | Autochequeo | DATOS=00(H) DATOS=00(H) |
| 6 bytes | 55 03 02 00 00 54 |
| 5 | 0×06 | Número total de salida de luz | DATOS=00(H) DATOS=00(H) | Número total de salida de luz | 6 bytes | 55 06 02 00 00 51 |
| 13 | 0×20 | Ajuste de horas extras de funcionamiento continuo | DATOS=00(H) DATOS=00(H) | DATA=tiempo extra de funcionamiento continuo, unidad: min | 6 bytes | 55 20 02 00 14 63 (20 minutos) |
| 12 | 0xEB | NO.controlar | DATOS=00(H) DATOS=00(H) | N° de placa de circuitocontrolar | 66 bytes | 55 EB 02 00 00 aC |
2) Una computadora superior recibe
Tabla 4 Formulario de recepción
| STX0 | CMD | LARGO | DATOS | DATOS0 | CHK |
Tabla 5 Especificación del formulario de recepción
| NO. | Nombre | Especificación | Código |
| 1 | STX0 | Marca de inicio | 55 (H) |
| 2 | CMD | Dominio | Se muestra como tabla 6 |
| 3 | LARGO | Longitud de bytes (excepto STX0, CMD y bits de verificación) | / |
| 4 | DATOS | Parámetros | Se muestra como tabla 6 |
| 5 | DATOS | ||
| 6 | CHK | Pago XOR (Excepto los bytes de verificación, todos los bytes pueden tener una verificación XOR) | / |
Tabla 6 Especificación de comandos y bits
| NO. | Comandos | Especificación | bytes | Nota. | Longitud |
| 1 | 0×00 | Stand by (paradas continuas de trabajo) | D1=00(H) D0=00(H) |
| 6 bytes |
| 2 | 0×01 | Trabajo individual | D3 D2 D1 D0 |
| 8 bytes |
| 3 | 0×02 | Trabajo continuo | D3 D2 D1 D0 |
| 8 bytes |
| 4 | 0×03 | Autochequeo | D7 ~D0 | D5-D4: -5 V, unidad: 0,01 V D7-D6:+5 V, Unidad: 0,01 V (<450 V es bajo voltaje) | 13 bytes |
| 6 | 0×06 | Número total de salida de luz | D3~D0 | DATOS=Números totales de salida de luz (4 bytes, el byte más significativo está al frente) | 8 bytes |
| 9 | 0xED | operando horas extras | 0×00 0×00 | El láser está bajo protección y deja de funcionar | 6 bytes |
| 10 | 0xEE | error de pago | 0×00 0×00 |
| 6 bytes |
| 11 | 0XEF | 0×00 0×00 |
| 6 bytes | |
| 18 | 0×20 | configuración de horas extras de operación continua | DATOS=00(H) DATOS=00(H) | DATA=tiempo extra de funcionamiento continuo, unidad: min | 6 bytes |
| 12 | 0xEB | NO.controlar | D12…… D0 | D10 D9 NO.del circuito de accionamiento Versión de software D8 D7 | 17 bytes |
| Nota: bytes/bits de datos no definidos.El valor predeterminado es 0. | |||||