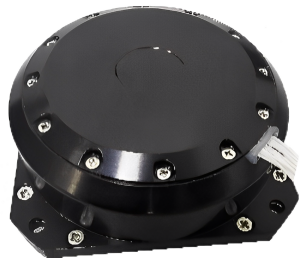
Giroscopio láser tipo 58




CARACTERÍSTICAS DEL PRODUCTO
●Rendimiento de muy alto costo
●El sensor de temperatura integrado se puede utilizar para compensar los parámetros del giroscopio en tiempo real
●Con un conector eléctrico de 25 pines, el giroscopio emite dos señales digitales de nivel TTL, que se pueden conectar a los circuitos de identificación, demodulación y conteo de fase para obtener las señales de desplazamiento angular requeridas.
●Utilizando una fuente de alimentación de CC de +15 V, +5 V y -5 V
ÁREAS DE APLICACIÓN
●Brújula de plataforma marina
● Referencia local
●Misiles tácticos de medio alcance
●Sistema de posicionamiento y orientación de precisión media
● helicóptero
●Sistemas de actitud
● Artillería autopropulsada, torpedos, etc.
INDICADORES DE DESEMPEÑO
|
| Clase 1 | Clase 2 | Clase 3 |
| Estabilidad de polarización cero | ≤ 0,01º/h | ≤ 0,015º/h | ≤ 0,02º/h |
| Repetibilidad de polarización cero | ≤ 0,01º/h | ≤ 0,015º/h | ≤ 0,02º/h |
| Deambular al azar | ≤ 0,002º/√h | ≤ 0,003º/√h | ≤ 0,005º/√h |
| Factor de escala | ≤ 5 ppm (1σ) | ||
| Sensibilidad del campo magnético | ≤ 0,004 º/h/Gs | ||
| Gama dinámica | ≤ ±400°/S | ||
| Tiempo de inicio | ≤10秒 | ||
| MTBF | >20000小时 | ||
| Temperatura de funcionamiento | -40℃~+65℃ | ||
| Dimensión | (85±2) × (75±2) × (52±2) (mm) | ||
| Peso | 620±20 (g) | ||
| El consumo de energía | < 5W | ||
| Choque | 75 g, 6 ms (medio seno) | ||
| Vibración | ≤ 9,5 g; (1300 Hz ~ 1500 Hz es el punto de resonancia del giroscopio, y el punto de resonancia del giroscopio tipo A, tipo B y tipo C se reduce en orden, lo que debe evitarse en el diseño estructural del sistema de guía inercial). | ||